
The decision to add a below-decks autopilot to our boat wasn’t an easy one. For one, it’s expensive, and also a very difficult, time-consuming install. Furthermore, we already have a wheel-mounted autopilot. Why on earth do we need a different one? Then there’s the eternal debate between windvanes vs electric autopilots.
The answer to why we needed a below-decks autopilot is an easy one – our Raymarine ST4000+ wheel pilot simply can’t handle our boat in strong wave conditions, running with a following sea. And that’s the main job we need an autopilot for. The wheel pilot is rated for vessels up to 16,500 lbs, and ours is 17,000 lbs when empty. Loaded with cruising gear it’s likely 19,000-20,000 lbs.

The new autopilot system – Raymarine EV-200
Probably the biggest thing motivating a below-decks autopilot is the memory of our Hecate Strait crossing last June in a gale. I hand steered for almost 18 hours in big, breaking, following seas because the wheel autopilot couldn’t handle it. But there have been plenty of other times where it would’ve been nice to have an autopilot I could have confidence in.

Hecate wave state before it got hard. These were the “easy” waves.
Self-Steering: What People Need it For
Before choosing an autopilot it’s worth understanding what you need it for. It took us 4 years to figure this out. There are three main reasons I see people using self-steering for:
- Crossing oceans (ie, very long passages)
- Convenience – steering for you even when you are perfectly capable of doing so yourself. Ex, while motoring because you’re bored/tired of steering. Or sailing in easy conditions.
- Steering when you physically are unable to, due to being exhausted or occupied with other concerns (reefing, seasickness, etc).
Our wheel pilot works well for #2 – a convenience device for motoring or sailing in easy conditions. And in fact this is probably what most coastal cruisers need, and why you see many wheel pilots on boats 35-40’.
Windvane vs Electric Autopilot
A windvane vs an electric autopilot is something we’ve debated a long time. We’re a low electrical usage boat, preferring to minimize fancy electronics (which are expensive and prone to eventual breakage). A windvane has additional appealing attributes like being mechanical (easier to repair than an electric motor) and potentially acting as a backup rudder. The price is about the same as a below-decks autopilot (~5 boat bucks without labor costs) and the install time probably in the same ballpark as well.
On the other hand, a vane adds a giant appendage to the stern, extends the boat’s length (a consideration during docking and at marinas that charge by eLOA, like Shilshole – we’d potentially be paying for 2 more feet of boat), and can be tricky to adjust in rapidly changing conditions like those we’re commonly sailing in.
A windvane seems like a great choice for crossing oceans, but that’s not what we need self-steering for. We need it for high latitudes coastal sailing on passages of about 3 to 24 hours, for brief periods when reefing, and for convenience when motoring.
I’ve read advice from windvane manufacturers and users that say you need to ensure the boat’s sails are balanced for conditions in order for the windvane to steer well. I’ve also heard people say they underpower their sails a bit to get the windvane to work better.
But that’s exactly what we don’t need – self steering that works well in easy conditions but not in the hard conditions. If it can’t do its job when the boat is unbalanced and overpowered (because you can’t always guarantee having the right sail plan up in rapidly changing conditions), then it’d be letting us down at the worst possible time. And we need it for seas the boat can’t possibly have a balanced helm in (square cross seas with wind against current, running DDW or broad reaching).
Even if there is a windvane that can do that, it still couldn’t do what we needed in Hecate: dynamically driving to the waves, not following any fixed heading or wind angle. An electric autopilot could allow us to do that, by using the +10 / –10 buttons to drive up / drive down for breaking waves and different wave directions. In fact, S/V Totem did something like this when their steering cable broke off the coast of Columbia.
Below-Decks Autopilots – How They Work
Most below-decks autopilots use a mechanical or hydraulic drive arm to push / pull on a pivot point around the rudder shaft. This pivot point could be a tiller arm or the steering system’s radial drive / quadrant (attaching directly to the drive/quadrant is not preferred though – see part 2 for why). A tiller arm is a separate fitting about 10” long specifically designed for autopilots – like the tiller on a tiller-driven boat, but much smaller and controlled by a machine rather than human.

Test fitting the drive unit to the tiller arm in our rudder space.
The drive arms come in power ratings from Type 1 to Type 4. The displacement of your boat determines which you need. As to mechanical vs hydraulic for the drive arm, that comes down to personal choice. Some reports I read from other sailors recommended hydraulic because the units are stronger and potentially longer lasting. But the extra strength really isn’t necessary unless you’re already pushing the limits of the drive (which wouldn’t be the case for us – 20,000 lbs of displacement is well within spec of a Type 1).
And other reports I read said mechanical drives can be long lasting as well (some sailors reported thousands of miles and 10+ years of trouble-free operation). Also, some said that the mechanical drives are quieter than hydraulic – a big plus for us because the annoying constant sound of our old wheel pilot was one thing that turned us off from using it.

Our rudder stock area is a very tight, confined space, so I knew this would be a difficult project.
Raymarine Type 1 Autopilot System
Raymarine has a rather sophisticated autopilot system, and it made sense to go with them because we already have other Raymarine electronics – so the autopilot could easily interface with our wind anemometer for driving a course to a true or apparent wind angle.
The system can be bought as one big package, Evolution Sail Autopilot with Type 1 linear drive, which includes several parts:
- Type 1 Linear Mechanical Drive – this is the motor that drives all the force on the rudder stock
- ACU-200 – the power center and “brain” of the autopilot
- EV-1 Sensor Core – a pod of sensors with 3-axis compass, gyro, and accelerometer
- p70s Controller – the display unit through which you control the autopilot
- Rudder position sensor (RPS) – this tells it precisely what angle your rudder is pointed at, which is useful because on sailboats when you have weather helm or even current interactions, having the rudder centered is not the position that will make you go straight.
Note the RPS is included with the ACU-200 in the “sail” autopilot package but this wasn’t clear in product descriptions on the web, so I wasn’t sure if I had to buy it separately.
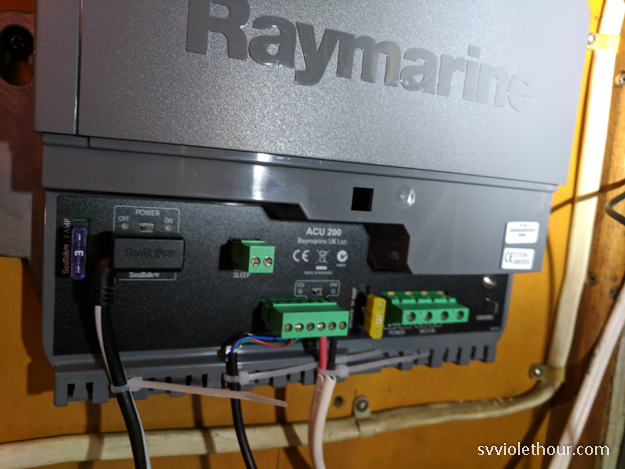
The ACU-200 with the bottom panel open while I was wiring it up.
To Be Continued
In the next part I’ll get into the installation process, starting with fitting a tiller arm onto the rudder shaft.
My friend Victoria is wanting to put this brand on her boat High Voltage for the upcoming Round North Island race. She is looking forward to the next posts! 🙂
Great! The next two posts will be out in the next 2-3 weeks. If she has any questions she’s welcome to email me.